

一、系统电气原理图
本项目中以运动控制卡为控制核心,配合迈克彼恩LS伺服驱动系统部件,设计出了凹版印刷机干燥箱快速检测平台控制系统的电气原理图。

二、控制电源
本次设计中,迈克彼恩LS伺服驱动系统采用三相220V电源。对于其它低压电气元件,将通过开关电源转化为直流24V对其供电。为此,系统设置一个总开关,控制系统的总电源;由于国内三相电压为380V交流电源,因此需要加一个交流变压器把电压转换为三相220V交流电;再分设一个交流电源控制开关与一个直流电源控制开关。控制电源方面采用一个常闭按钮、一个常开按钮和交流接触器组合,可方便的实现电路的通断,开关的极数对应各伺服的需要。
三、运动控制卡电气接口设计
根据项目中运动控制卡的控制功能,对运动控制卡与各伺服电气接口以及运动控制卡与各伺服驱动脉冲串输入接口进行了设计。所选用阿尔泰USB1020运动控制卡在工作过程中,结合其通用输入、输出特性,以及本项目的应用特点对运动控制卡62芯插头及40芯D型插头管脚进行了定义,以X轴为例进行了设置,Y、Z、R轴的设置同X轴,X轴管脚定义具体设置如下表所示:

四、伺服电气接口设计
测试平台设计中使用伺服系统来实现准确定位,因此伺服系统采用位置控制模式的接线方法。在此模式下迈克彼恩LS伺服需设置三个外部接口,其中CN1专门用于上级控制信号的输入及输出;CN2用于编码器信号的输入;CN3用于与上级通信机进行通信。CN1端口设有脉冲串输入、脉冲方向符号、定位完成、伺服开启、伺服报警等,用来控制伺服系统的运动。伺服驱动使用外部直流24V电源。把伺服参数PE-601设置为2,使得伺服系统进入位置模式进行定位运转,同时相应针脚功能的设置如下表所示。

五、伺服系统的参数设置
对伺服系统的接线原理及控制功能了解后,定位精度还不能很好保证,需要对伺服参数进行设置以实现驱动与电机更好的定位匹配。以X轴伺服为例具体参数设置如下表4-6:

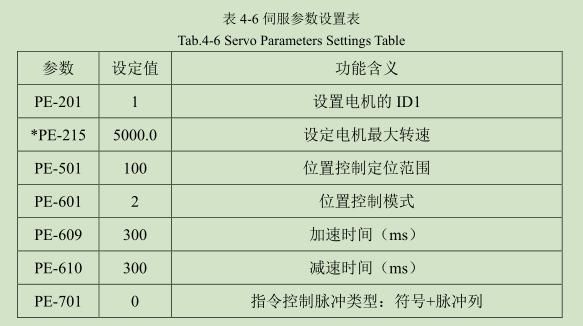
参数设置说明:
(1)由于测试平台是多电机控制模式,设置电机的ID是为了能很好的对各电机进行指令脉冲控制。假设X电机为1号电机进行参数设定示例。
(2)为了防止电机在测试过程中转速超过设定值太多,可以通过此参数来设定。
(3)定位范围是用来设定输出定位完毕信号的范围。偏差计数器中滞留的脉冲数若小于定位完毕范围设定值,则INP-SG将导通,此时输出定位完成信号。若定位范围的设定比较大,并且伺服系统运行速度较低,此时可能一直处于导通的状态。为了使系统按照设计的时序图工作,同时保证运行的可靠,需设定定位范围PE-501的值,初步设置为100。
(4)平台主要是实现准确定位的,故把PE-601伺服系统设置为位置控制模式;
(5)通过加减速时间设定可以控制平台运行中的稳定性。
(6)用符号和脉冲串形式来控制伺服电机的正反转,把运动控制卡高速脉冲输出口和PP连接来控制伺服电机的转速和转动角度;通过控制NP端口的电平来制电机转动的方向。
六、数据采集卡接口设计
数据采集卡USB2817为16单通道或者8双通道的数据采集卡,本课题项目中风温、风速模拟信号只需要占用两个模拟量输入通道,为了便于接线及后续扩展,对37芯D型插座CN1的管脚及50芯插座PI的管脚具体定义如下表4-7和4-8:http://www.zhsysb.cn


 粤公网安备 44190002002768号
粤公网安备 44190002002768号