

过程控制对象的特性干变万化,理想调节特性无法圆满地解决所有控制对象的调节问题。经过长期实践和理论探索,人们针对各种不同的对象特性和操作特点,提出了一系列改进型的PID调节特性。这些调节特性大多数涉及到逻辑运算或时序处理,在模拟调节器上往往难以实现,但对内藏微处理器的数字调节器来说却显得简便易行。
1.抗积分饱和ND
在控制系统中,调节器积分作用的特点在于只要偏差存在,相应的控制分量便不断积累,使调节器输出值根据偏差极性向上限或下限变化。如果对象惯性较大,偏差不能及时梢除,调节器输出恒就会超出线性工作范围而进入饱和区。这种饱和现象起源于积分作用,故被称为积分饱和。积分饱和造成的危害包括两个方面:一是引起执行器“卡死”或损坏;二是使系统在偏差反向后输出迟迟不能退出饱和,导致过渡过程动作迟缓、超调严重。第一个问题可以通过输出限幅加以解决。第二个问题可采取如下措施加以解决。
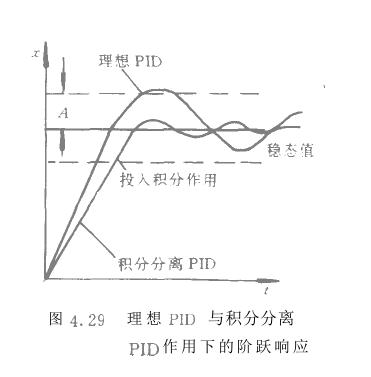
这种方法是在被控量刚开始跟踪设定值时取消积分作用,仅使比例、微分项起作用;当被控量接近设定恒时再将积分作用投入,以此削弱积分累积效应,抑制积分饱和引起的超调和过渡过程缓慢的现象。A为积分门限,对不同控制对象应取不同值,一般为10%左右。这种积分分离法因处理简便、效果明显,在数字调节器中应用比较普遍。图4.29所示为理想PID与积分分离P1D跟踪阶跃输入的动态响应过程,可以明显看出积分分离算法具有减小超调、缩短稳定时问的效果。
2.抗设定值冲击型门
所谓设定值冲击是指系统运行过程中,人工操作或串级输入的设定恒发生跃变时,算法的比例作用或微分作用较强,使控制量超过执行机构允许的最大限度,对系统的动态过程造成冲击和影响。无论对象惯性大与小,这种现象都有可能发生。它使系统动态过程放慢,严重时会产生振荡。消陈设定值冲击常使用以下方法,即把因输出饱和和未能执行的控制增量存储起来,一旦退出饱和,立即将积累量补充执行。这样并不损失控利分量,而是把幅度上无法承受的控制作用分摊在时间上,以便在不过分增大系统超调的前提下加速动态过程。在数调节器上这种方法简便易行。
3.非线性型PID
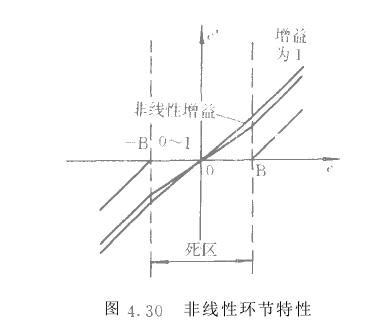
非线性型PID是指在一般PID运算之前插入一个非线性环节,特性如图4.30所示众非线性区域内,增益为0―1之间的某一数值,将使调节器无动作或只有轻微动作:在非线性区域外,增益为1,调节器仍然按正常线性规律动作。非线性宽度与增益可以根据需要整定。当增益取值为时,成为带死区的控制器;苔取值为1,成为普通的线性变换器;如果非线性宽度取为0,则非线性同样不复存在。在5比PC中设有死区可调的非线性控制特性,通过侧板按键整定参数。
非线性控制特性使用于非线性对象和要求避免频繁动作的场合(如跑偏控制)。对这类对象若采用线性控制,难以取得理想的控制效果。以上介绍了以PID算法为基础进行改进、扩充形成的几种调节算法,经过一些微机化仪器仪表的应用实践,证明在一定条件下是行之有效的。除此之外,人们还探索了一些新方法,如变步距逐次逼近算法摆糊调节算法、智能算法点等。这些算法有的尚在发展府待完善,这里不再介绍,有的与智能技术密切关联,在下面的内容中为您介绍。http://www.zhsysb.cn

 粤公网安备 44190002002768号
粤公网安备 44190002002768号